132-8780-6732
水下机器人的分类和关键技术介绍
一、水下机器人主要分为两大类:遥控操作式和自主式。
1.遥控操作式水下机器人(ROV):
通过电缆连接地面站或母船,由操作员远程控制。ROV通常配备有摄像头、灯光、机械臂等设备,适用于海底勘查、管道检查、水下打捞等多种任务。由于受到电缆长度的限制,ROV的工作范围相对有限。
2.自主式水下机器人(AUV):
具备自主 导航和决策能力,能够在没有直接人工干预的情况下执行预定任务。AUV携带的能量和存储空间有限,因此在设计上更加注重能效和续航能力。AUV广泛应用于海洋环境监测、地质调查、海洋生物研究等领域。
二、关键技术
1.导航与定位系统:水下机器人需要导航与定位技术来确定自身位置和运动方向。常用的定位方法包括声学定位、惯性导航系统(INS)、全球定位系统(GPS)等。
2.传感器技术:为了收集各种环境数据,水下机器人配备了多种类型的传感器,如温度传感器、压力传感器、水质分析仪、声呐等。这些传感器的数据对于科学研究和资源勘探至关重要。
3.通信技术:水下通信面临诸多挑战,如信号衰减严重、传输速率低等。因此,开发高 效可靠的水下通信技术是提高水下机器人作业效率的关键。
4.能源管理系统:对于自主式水下机器人而言,合理的能源管理策略可以延长其工作时间和作业范围。目前,常见的能源管理技术包括能量优化算法、太阳能充电等。
最新文章
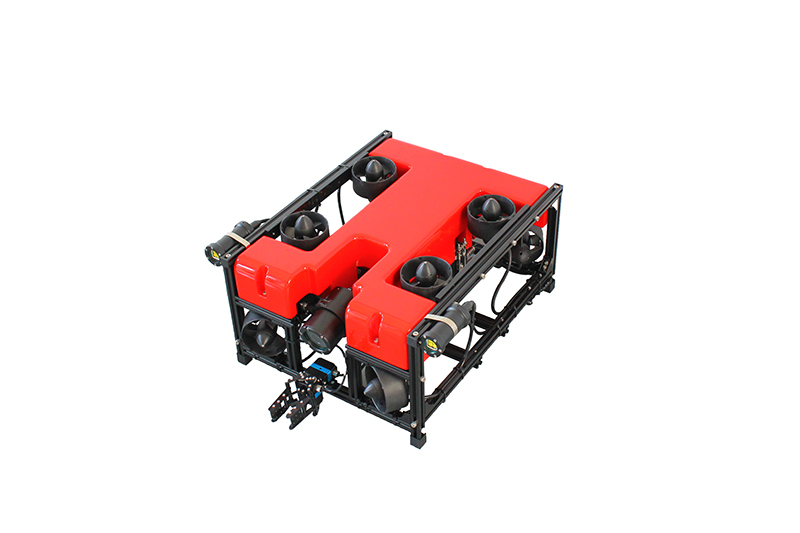
方得海洋客户定制款六推水下机器人
方得海洋深耕水下智能装备领域,以技术创新与定制化服务为核心,近期客户定制款六推水下机器人,凭借350米深潜能力、高清浑水成像、灵活作业与智能操控等硬核性能,为海洋科研、工程检测、应急救援、水产养殖等领域提供一站式水下作业解决方案,彰显方得海洋在水下装备研发与定制化服务的领先实力。

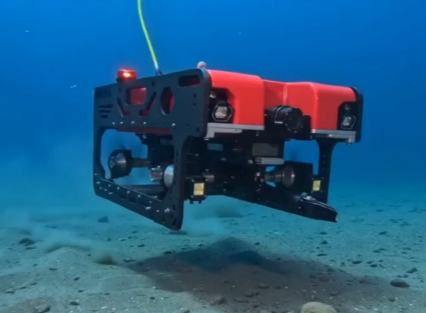
方得海洋水下机器人3级海况稳定作业硬核实测
方得海洋水下机器人硬核抗流抗浪性能,打破近海涌浪对水下工程的作业限制,为海洋工程检测、水下结构巡检、应急救援等场景提供全天候、高可靠的装备支撑。

组合惯导水下定位与路径规划验证
威海方得海洋科技有限公司专注于海洋智能装备研发,依托自主研发的八推水下机器人平台,深度融合组合惯导与多源感知技术,构建了一套完整的水下定位与路径规划验证体系,为水下自主作业提供了可靠的技术解决方案。

方得海洋室外综合测试水池正式投用
方得海洋全新室外综合水下测试水池正式投用,尺寸为长10m、宽3m、水深3m,可全方位支撑水下机器人、仿生鱼装备、水下导航系统等产品全流程性能验证,为公司海洋智能装备自主研发搭建起关键本土试验载体。

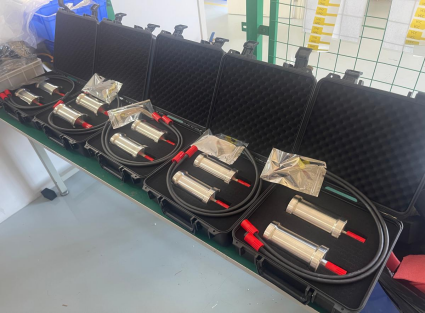
方得海洋特色产品:大深度深水方形泛光灯
100W大功率LED光源,额定亮度可达10000流明,6500K标准日光色温,还原海底真实地貌、管线、构筑物色彩细节,消除水下拍摄偏色、阴影问题,完美配套水下高清摄像系统,满足高精度观测、施工记录等作业需求。

尼日利亚部级代表团到访方得海洋
尼日利亚联邦政府部级高官代表团一行,在中国机械对外经济技术合作有限公司(英文简称CMIC)核心团队的陪同下,专程莅临我司考察调研,实地体验并深度测评公司自主研发的海洋智能装备
热销出圈:深水广角网络摄像机批量发货
125°真正水下大广角镜头,突破常规水下摄像头视野狭窄的弊端,可实现大范围水域全景监测,大幅减少监控盲区。同时内置专业图像校正算法,完美解决鱼眼镜头常见的画面拉伸、变形问题,实现画面无畸变、视野更规整,全景画面真实还原水下场景全貌。

ROV软件界面,我们看水下世界的窗户
一款优秀的ROV控制系统界面,不仅是操作指令的载体,更是操作员与水下设备之间的“桥梁”。以威海方得海洋科技的ROV控制系统界面为例,其模块化、高集成度的设计,为复杂水下作业提供了清晰、高效、安全的操控保障,展现了现代海洋装备软件界面的卓越优势。

FD-AC-02B21深水高倍SDI变焦摄像机
FD-AC-02B21深水10倍SDI变焦摄像机,支持10倍光学变焦+12倍数字变焦,是专为深海复杂环境打造的高性能可视化设备,以高清成像、深度耐压与稳定传输为核心优势,为水下机器人作业、深海科考、海洋工程等场景提供可靠的视觉支持。





contact us
李经理:132-8780-6732
王经理:158-5465-8979
地址:山东威海高新区智能装备产业园福田路10-4号
本站部分内容来源于网络,如果您认为我们侵犯了您的版权请告知,我们将立即删除
备案号:鲁ICP备2024116257号-1